Included Data
• Sensor Adaptation Data
- VoxelScape → KITTI
- VoxelScape → nuScenes
• Weather Adaptation Data
- Clear → Rain (KITTI)
- Clear → Snow (KITTI)
- Clear → Rain (nuScenes)
- Clear → Snow (nuScenes)
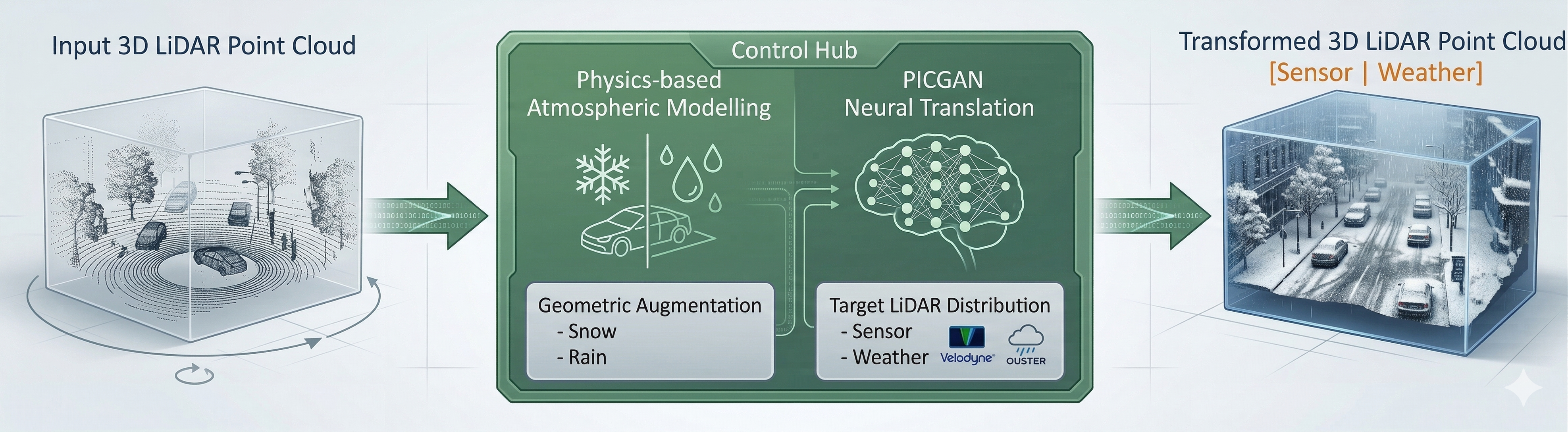
ReaLiTy is a unified physics-informed framework for generating sensor-specific LiDAR intensity adaptations and realistic adverse-weather transformations across datasets, sensors, and environments. Unlike existing datasets that provide only raw adverse-weather scans or isolated simulated sweeps, ReaLiTy transforms benchmark clear-weather point clouds into physically consistent adverse-weather data, applying geometric distortions and realistic intensity attenuation to produce paired clear-and-adverse weather point clouds while preserving the original dataset format. It also enables sensor-specific intensity transformation for any dataset, allowing direct adaptation to different LiDAR sensors.
Building on this framework, we also release the LiDAR Adaptation Dataset Suite (LADS), a collection of transformation-ready, paired point clouds derived from multiple benchmark datasets. LADS offers fully processed, physically consistent LiDAR sweeps that include realistic intensity adaptation and weather-specific degradations, enabling direct, one-to-one comparison with the original unmodified datasets.
Together, ReaLiTy and LADS provide the community with a reproducible and extensible foundation for research on LiDAR realism, sensor adaptation, and simulation-driven perception. The generated point clouds exhibit high-fidelity intensity distributions, realistic weather effects, and significantly improved cross-domain consistency.
KITTI Clear -> KITTI Snow
nuScenes Clear -> nuScenes Rain
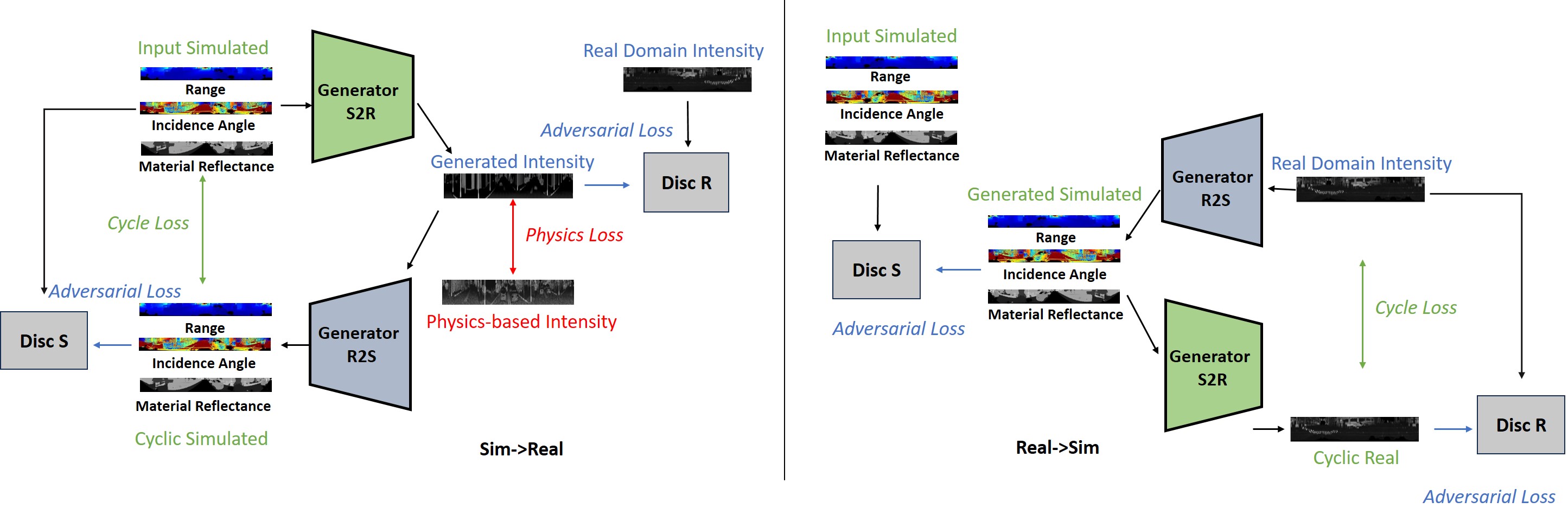
ReaLiTY – Sensor Transfer - PICGAN
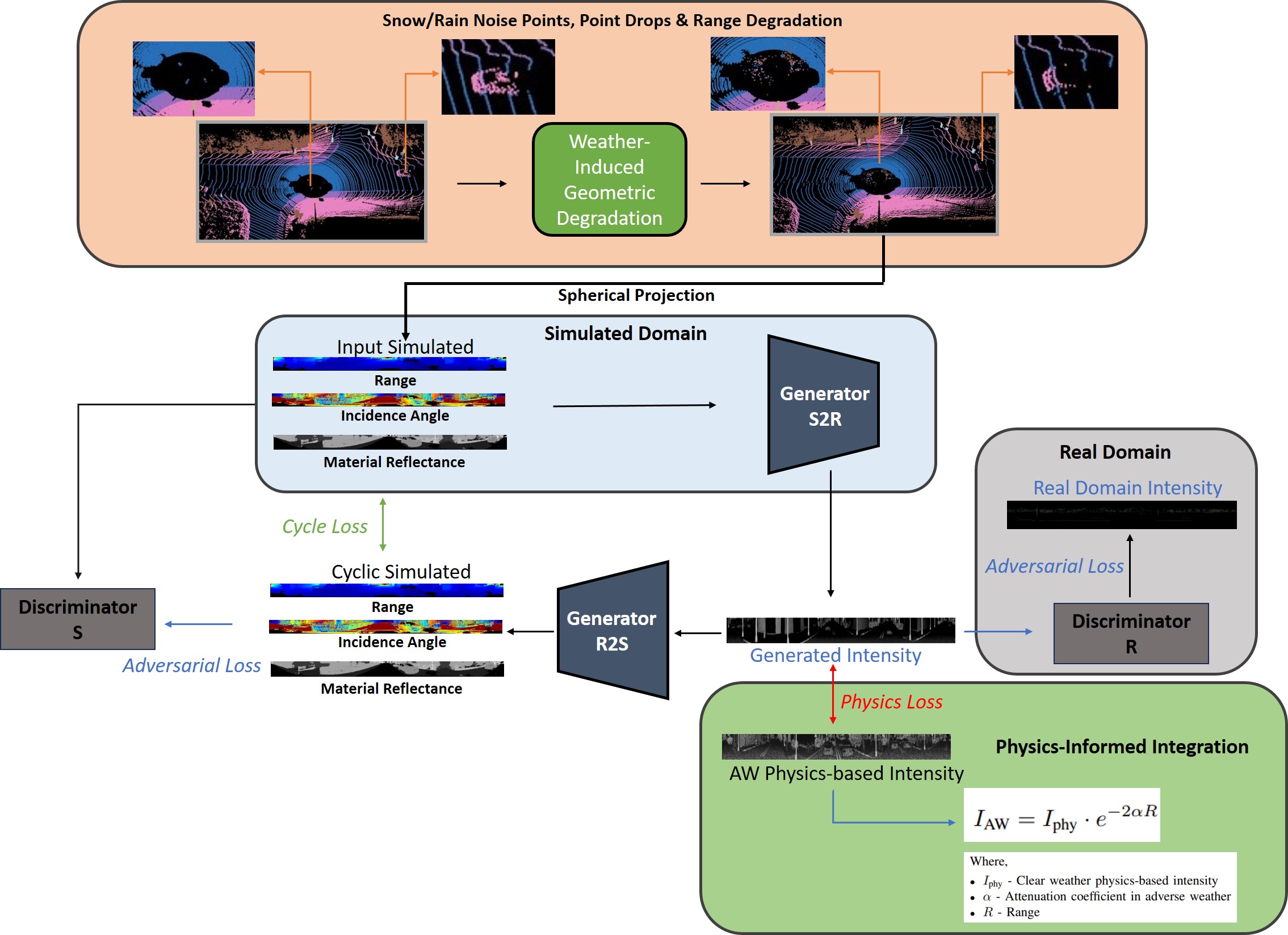
ReaLiTY – Weather Transfer - PICWGAN
ReaLiTy Framework orchestrates our Physics-Informed Cycle-Consistent GAN (PICGAN) and Physics-Informed Cycle-Consistent Weather GAN (PICWGAN) architecture within a modular, unified physics-informed pipeline for LiDAR realism. It enables:
The repository provides the following components:
ReaLiTY Pipeline
ReaLiTy/ │ ├── ReaLiTy.py │ ├── models/ │ ├── PICGAN/ │ ├── PICWGAN/ │ ├── prepare_training_data.py │ ├── structure/ │ ├── projection.py │ ├── weather.py │ ├── backprojection.py │ ├── data/ │ └── prepare_training_data.py │ ├── training/ │ └── train_picgan.py │ ├── transform/ │ └── transform.py │ ├── weights/ │ ├── sensor/ │ └── weather/ │ ├── configs/ │ ├── sensor.yaml │ └── weather.yaml │ └── README.md
🔗 View ReaLiTy Framework on GitHub
LiDAR Adaptation Dataset Suite (LADS) offers:
LADS also provides:
• Sensor Adaptation Data
• Weather Adaptation Data
If you find this work useful in your research, please consider citing:
@article{anand2026sim2real,
title = {Toward Closing the Sim-to-Real Gap: A Physics-Guided Learning Approach for LiDAR Intensity Simulation},
author = {Anand, Vivek and Lohani, Bharat and Kumar, Vaibhav and Mishra, Rakesh and Pandey, Gaurav},
journal = {IEEE Transactions on Intelligent Transportation Systems},
year = {2026},
note = {Early access},
doi = {10.1109/TITS.2026.3681982}
}
@misc{anand2026weather,
title = {Simulating Realistic LiDAR Data Under Adverse Weather for Autonomous Vehicles: A Physics-Informed Learning Approach},
author = {Anand, Vivek and Lohani, Bharat and Mishra, Rakesh and Pandey, Gaurav},
year = {2026},
eprint = {2604.01254},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
note = {arXiv preprint},
url = {https://arxiv.org/abs/2604.01254}
}
@article{anand2025lblis,
title = {Advancing LiDAR Intensity Simulation Through Learning With Novel Physics-Based Modalities},
author = {Anand, Vivek and Lohani, Bharat and Pandey, Gaurav and Mishra, Rakesh},
journal = {IEEE Transactions on Intelligent Transportation Systems},
year = {2025},
volume = {26},
number = {5},
pages = {6493--6502},
doi = {10.1109/TITS.2025.3532687}
}
@inproceedings{anand2025snow,
title = {Towards Realistic LiDAR Intensity Simulation in Snowy Weather Using Physics-Informed Learning},
author = {Anand, Vivek and Lohani, Bharat and Mishra, Rakesh and Pandey, Gaurav},
booktitle = {IEEE Intelligent Vehicles Symposium (IV)},
year = {2025},
pages = {2552--2557},
doi = {10.1109/IV64158.2025.11097501}
}
@misc{anand2026reality_lads,
title = {ReaLiTy and LADS: A Unified Framework and Dataset Suite for LiDAR Adaptation Across Sensors and Adverse Weather Conditions},
author = {Anand, Vivek and others},
year = {2026},
eprint = {XXXX.XXXXX},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
note = {arXiv preprint}
}